20x20 Stack for FPV Drones
-

RDQ 30x30 to 20x20 Stack Adapter - 3D Printed TPU - Choose Your Color
Original price $2.99 - Original price $2.99Original price$2.99$2.99 - $2.99Current price $2.99Convert any frame to use a 20x20 stack or even use a 30x30 4n1 ESC and 20x20 FC with this new RDQ TPU Stack adapter! NOTE: On the bottom of the ada...
View full detailsOriginal price $2.99 - Original price $2.99Original price$2.99$2.99 - $2.99Current price $2.99 -


RDQ Mini Receiver Holder for 20x20 Stacks - 3D Printed TPU - Black
Original price $2.99 - Original price $2.99Original price$2.99$2.99 - $2.99Current price $2.99If you're tired of sticking your RX in weird places only to have it fall off mid flight then this is the 3D print for you. This little guy will sec...
View full detailsOriginal price $2.99 - Original price $2.99Original price$2.99$2.99 - $2.99Current price $2.99 -

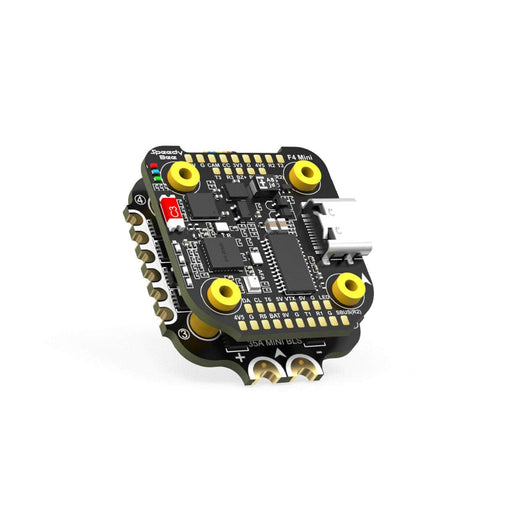
SpeedyBee F4 Mini 3-6S 20x20 Stack/Combo (F405 FC / 35A 8Bit 4in1 ESC)
Original price $59.99 - Original price $59.99Original price$59.99$59.99 - $59.99Current price $59.99The SpeedyBee F4 3-6S 20x20 Stack/Combo (F405 FC / 35A 8bit 4in1 ESC)! Experience feature-rich performance and an unbeatable price for a...
View full detailsOriginal price $59.99 - Original price $59.99Original price$59.99$59.99 - $59.99Current price $59.99 -

SpeedyBee F7 Mini 35A 3-6S 20x20 Stack/Combo (F7 FC / 35A 8bit 4in1 ESC)
Original price $95.99 - Original price $95.99Original price$95.99$95.99 - $95.99Current price $95.99The ultimate 20x20 stack for on the go tuning! With integrated bluetooth, this stack allows you to access Betaflight and even BLHeli through the Sp...
View full detailsOriginal price $95.99 - Original price $95.99Original price$95.99$95.99 - $95.99Current price $95.99 -


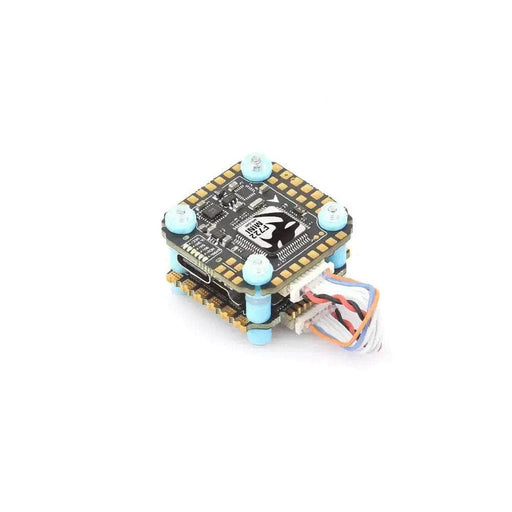
iFlight Blitz Mini F722 E55 2-6S 20x20 Stack/Combo (F722 FC/ 55A 32bit 4in1 V1.3 ESC)
Original price $139.99 - Original price $139.99Original price$139.99$139.99 - $139.99Current price $139.99The new iFlight Blitz Mini F722 E55 2-6S 20x20 Stack/Combo (F722 FC/ 55A 32bit 4in1 ESC) series offers stellar performance at an affordable price. ...
View full detailsOriginal price $139.99 - Original price $139.99Original price$139.99$139.99 - $139.99Current price $139.99 -

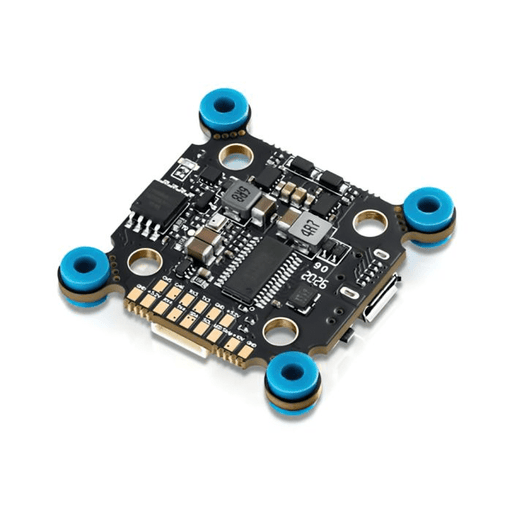
Diatone Mamba MK4 F722 Mini F40_128k 3-6S 20x20 Stack/Combo (F722 FC / 40A 128k 32Bit 4in1 ESC)
Original price $94.99 - Original price $94.99Original price$94.99$94.99 - $94.99Current price $94.99Diatone has released their 4th generation F722 mini stack. The MK4 F722 mini 20x20 stack boasts larger soldering pads, wider pad spacing, more UART...
View full detailsOriginal price $94.99 - Original price $94.99Original price$94.99$94.99 - $94.99Current price $94.99 -
Hobbywing XRotor F722 3-6S 20x20 Stack/Combo (F7 FC / 32Bit 40A 4in1 ESC)
Original price $119.99 - Original price $119.99Original price$119.99$119.99 - $119.99Current price $119.99Hobbywing has heard your requests, and answered with this new amazing stack. Featuring a new F7 FC with their signature 40A ESC; this stack is trul...
View full detailsOriginal price $119.99 - Original price $119.99Original price$119.99$119.99 - $119.99Current price $119.99 -
T-Motor F411 & V45A Lite 3-6S 30x30 20x20 Stack/Combo (F4 FC / 8Bit 45A 4in1 ESC)
Original price $76.89 - Original price $76.89Original price$76.89$76.89 - $76.89Current price $76.89The T-Motor VELOX Lite F411 Stack is a budget-friendly stack that is equipped with the VELOX Lite F411 FC and the VELOX Lite V45A 3-6S BLHeliS 4in1...
View full detailsOriginal price $76.89 - Original price $76.89Original price$76.89$76.89 - $76.89Current price $76.89Sold out -
T-Motor Mini F7 3-6S 20x20 Stack/Combo for DJI (F7 FC / 45A 4in1 ESC)
Original price $136.99 - Original price $136.99Original price$136.99$136.99 - $136.99Current price $136.99Lightweight DJI plug and play ready 20x20 stack from T-Motor. Check out our 20x20 Flight Controllers, our DJI compatible gear, and all our T-Motor ...
View full detailsOriginal price $136.99 - Original price $136.99Original price$136.99$136.99 - $136.99Current price $136.99Sold out -
Hobbywing XRotor F722 3-6S 20x20 Stack/Combo (F7 FC / 32Bit 45A 4in1 ESC)
Original price $119.99 - Original price $119.99Original price$119.99$119.99 - $119.99Current price $119.99Equipped with a powerful STM32F722 MCU and sensitive MPU6500 6-axis motion sensor, the XRotor F722 Stack/Combo offers bidirectional DShot digital t...
View full detailsOriginal price $119.99 - Original price $119.99Original price$119.99$119.99 - $119.99Current price $119.99Sold out -
HGLRC F760 Mini F722 3-6S 20x20 Stack/Combo (F7 FC / G071 32Bit 60A 4in1 ESC) - MPU6000
Original price $139.99 - Original price $139.99Original price$139.99$139.99 - $139.99Current price $139.99The HGLRC F760 Mini F722 3-6S 20x20 Stack/Combo is a powerful and reliable choice for your drone. With a 32-bit processor, a 4-in-1 ESC capable of ...
View full detailsOriginal price $139.99 - Original price $139.99Original price$139.99$139.99 - $139.99Current price $139.99Sold out -
SkyStarsRC F722 RS 3-6S 20x20 Stack/Combo (F722 FC / MVP60 F4 128K 32Bit 60A 4in1 ESC) - MPU6000
Original price $109.99 - Original price $109.99Original price$109.99$109.99 - $109.99Current price $109.99This SkyStarsRC Fly Stack is a powerful 3-6S 20x20 stack/combo with superior F722 FC, and powerful MVP60 F4 128K 32Bit 60A 4in1 ESC. Th...
View full detailsOriginal price $109.99 - Original price $109.99Original price$109.99$109.99 - $109.99Current price $109.99Sold out -
Hobbywing XRotor F722 3-6S 30x30 Stack/Combo (F7 FC / 32Bit 65A 4in1 ESC) (20x20 Mounting Option)
Original price $140.00Original price $140.00 - Original price $140.00Original price $140.00Current price $129.99$129.99 - $129.99Current price $129.99The Hobbywing XRotor F722 Stack/Combo packs in the latest tech: 65A (x4) ESCs, BLHeli_32 DShot 1200 support, two 5V BECs, plus a voltmet...
View full detailsOriginal price $140.00Original price $140.00 - Original price $140.00Original price $140.00Current price $129.99$129.99 - $129.99Current price $129.99Sold out

























At the crossroads of lightweight, and powerful sits the mini stack. Bigger than the 16x16, and nearly as powerful as the 30x30 options, this stack size is built to be used everywhere. It's a great addition to a sub 250g build as its smaller footprint allows it to save weight. Modern technology is able to make many of these stacks just as capable of running power-hungry quads as 30x30 stacks, with some ESC's coming with up to 65a! They even have up to 7 UARTs to allow for additional peripherals to be added at any point. Find your next perfect stack today!